![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
国立大学法人東京農工大学
研究推進部 研究支援課
| TEL | 042-367-5944 |
|---|---|
| FAX | 042-367-5898 |
本事業は文部科学省科学技術人材育成費補助金の「テニュアトラック普及・定着事業」の補助を受けて実施しています。
![]()
トップページ > テニュアトラック教員の紹介 > 渡辺 将央

渡辺 将央 (Watanabe Masahisa)

| 研究院 | 農学研究院 |
|---|---|
| 部門 | 農業環境工学部門 |
| 研究分野 | 農業工学、安全工学、信頼性工学 |
| キーワード | 農作業安全、仮想テストドライブ、ドライブシミュレータ、物理モデリング、統計モデリング |
| URL | https://sites.google.com/view/masahisa-watanabe-research/home?authuser=1 |
| 職歴 | ・2019年4月~2021年3月:日本学術振興会 特別研究員DC2 |
|---|---|
| 学歴 | ・2016年3月:東京農工大学農学部地域生態システム学科 卒業 |
| 受賞歴 | ※最新情報は教員のWebサイトをご覧ください |
| 主な論文・解説 | ※最新情報は教員のWebサイトをご覧ください |
地球規模での気候変動や地政学的リスクの高まりの中で、食料生産の重要性は高まっています。一方、我が国の食料生産の基盤となる農業では、労働力の高齢化や減少が急速に進んでいます。また、農業では、建設業や製造業などの他産業と比較して、高い割合で事故が発生しており、毎年多くの農業者が犠牲となっています。持続的な食料生産を実現するためには、農作業事故の低減が不可欠と言えます。特に農作業事故のうち、農業機械に係る事故は半分以上を占めており、機械作業の安全確保が重要な課題となっています。
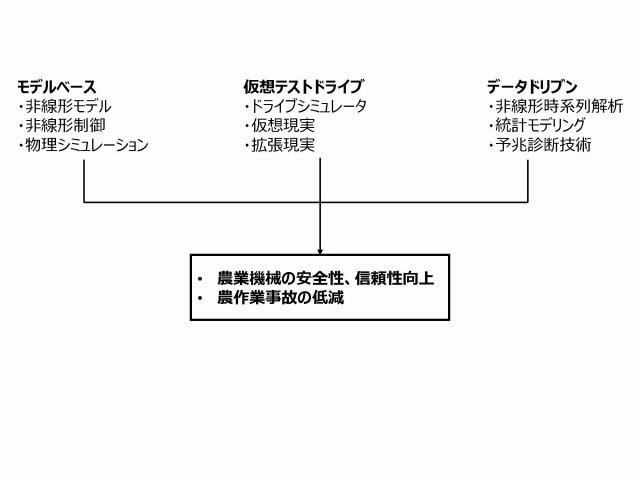
私はこれまで、主要な農業機械の一つである農用トラクタの横転事故を対象として、事故の力学的なメカニズム解明に取り組んできました。具体的には、非線形力学に基づく物理モデリングと数値シミュレーションを行い、トラクタが事故へと至る状況をパラメータスタディにより明らかにしてきました。また、非線形力学モデルに得られた成果を応用して、トラクタ・ドライブシミュレータを構築し、安全教育に資するシステムを開発してきました。以上の研究に加え、民間企業において、統計モデリングや機械学習を応用し、予兆診断などの産業機械の信頼性向上に関する研究にも従事してきました。
今後は、物理モデリングなどのモデルベース手法と時系列解析、統計モデリングなどのデータ駆動手法を組み合わせて、農業機械の安全性、信頼性向上に関する研究を推進していきます。また、仮想現実(Virtual Reality)や拡張現実(Augmented Reality)などのクロスリアリティ(XR)技術、モーションプラットフォーム技術などを統合して、オペレータが実際に危険挙動を体感できるインタフェースのシステム構築などにも取り組んでいく予定です。
アカデミアとインダストリーでの研究開発経験を活かし、我が国の持続的な食料生産に資する技術開発を遂行していきます。
本学のテニュアトラック制度は、スタートアップ資金や独立した研究室の確保、一定度の授業負担の免除など、独立した研究者(PI)として十分研究できる環境が与えられていると思います。
農学と工学の境界的な領域で研究に従事してきました。今後も分野を問わず、多くの研究者や技術者と交流し、楽しく技術開発を行っていきたいと思います。
![]()