![]()
![]()
![]()
![]()
![]()
Research Support Office Research Advancement Division. Tokyo University of Agriculture and Technology
| TEL | +81-42-367-5944 |
|---|---|
| FAX | +81-42-367-5946 |
This program is supported by MEXT’s scientific technology human resource development fee grant, "Program to Disseminate Tenure Tracking System".
![]()



Home > Introduction of our tenure-track faculties > MAEDA Takao

MAEDA Takao

| Affiliation | Institute of Engineering |
|---|---|
| Division | Division of Advanced Mechanical Systems Engineering |
| Research field | Robotics and Mechatronics |
| Keyword(S) | Space Robotics, Mechanics and Mechatronics, Guidance Control Navigation and Dynamics, Terramechanics |
| Url | http://web.tuat.ac.jp/~maelab/index.html |
| Research experience | ・Apr.2015 – Mar.2016:Nagoya University, Graduate School of Engineering, Dept. of Aerospace Engineering, Researcher |
|---|---|
| Educational background | ・Mar. 2010:B. S. (Eng.) Osaka Prefecture University
|
| Awards | * The latest information is shown at the member's website. |
| Selected papers and publications | * The latest information is shown at the member's website. |
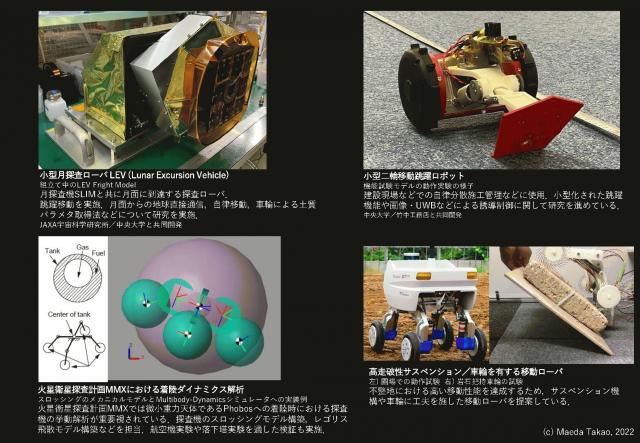
My research interests are the exploration technology of the moon, Mars, and asteroid’s surface and sub-surface. Using robot technology, we would like to access the extreme environment on the planetary body, where there is not yet been unveiled. For robotic exploration, robotics and mechatronics under the vacuum and microgravity environment become important. We are using a drop tower and the parabolic flight to test such an environment before launch. We also discuss the application of space robotics to commercial service robots, dual-use robots such as defense systems, agricultural robots, etc.
We can get a start-up fund from the university. A large area of experiment space is also prepared. The support desk of the university provides good support for paperwork. They also help us for getting a research grant. We can discuss getting the research grant from not only JSPS but also private companies. Excellently, they never shut the door in my face, even if we would like to discuss getting the grant from the defense division.
Planetary exploration will provide answers to the origin of life. It has an enormous impact on the view of science. Robotic exploration has a big chance to approach the answer. This also expands the area of human.

![]()