![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
国立大学法人東京農工大学
研究推進部 研究支援課
| TEL | 042-367-5944 |
|---|---|
| FAX | 042-367-5898 |
本事業は文部科学省科学技術人材育成費補助金の「テニュアトラック普及・定着事業」の補助を受けて実施しています。
![]()
トップページ > テニュア取得教員の紹介 > 水内 郁夫

水内 郁夫 (Mizuuchi Ikuo)

| 研究院 | 工学研究院 |
|---|---|
| 部門 | 先端機械システム部門 |
| 研究分野 | ロボティクス |
| キーワード | 筋骨格ヒューマノイド、キッチンアシスタントロボット、運動実現法、植物ロボット化 |
| URL | http://mizuuchi.lab.tuat.ac.jp/ |
| 職歴 | ・2000年~2001年:日本学術振興会特別研究員 |
|---|---|
| 学歴 | ・早稲田大学理工学部機械工学科卒業 |
| 受賞歴 | ※最新情報は教員のWebサイトをご覧ください |
| 主な論文・解説 | ※最新情報は教員のWebサイトをご覧ください |
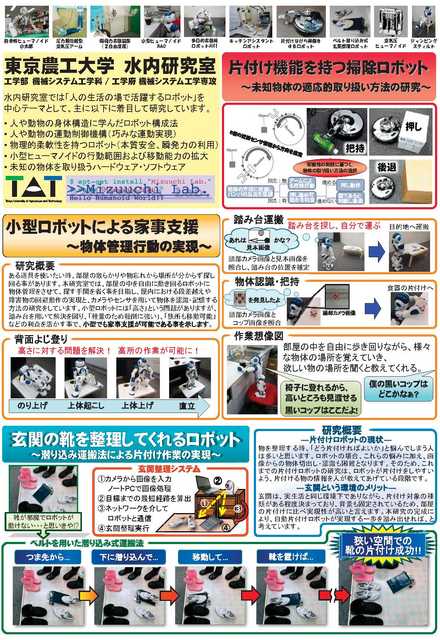
・筋骨格型ヒューマノイドの研究:身体構成法・制御法・ヒトの発達の仕組み・人工知能
・空気圧人工筋を用いたロボットシステム:コンプレッサ搭載型空気圧駆動ヒューマノイド
・弾性・慣性・重力のエネルギの巧みな分配による動的動作:瞬発力、ダイナミック動作
・小型ヒューマノイドによる家事作業の研究:台へのよじ登り、視覚を用いた食器片付け
・キッチンアシスタントロボットの研究:触覚・近接覚・力覚・視覚を統合した道食器の操作
・家庭内自律活動ロボット:片付けながら掃除をするロボット、玄関整理をするロボット
・力の大きさと方向の制御による物体操作:摩擦活用、手より大きな物体、滑りセンサ
・学習による運動実現:任意の制御量目標、ヒューマノイドの動的動作の学習
・植物とロボット:植物ロボット化、3種類の熟度判定に基づくブルーベリー収穫ロボット、リンゴの樹木構造の解析
・ロボットの知能ソフトウェア基盤の研究:EusLisp, OpenRTM, ROS, OpenCV
若手に自立した研究・教育の環境を与えることがしっかりできていると思います。教員の研究面のみならず人材育成者としての意識を育てる環境も重要だと思います。
長期的ビジョンを忘れずに、研究を推進してゆきたいと思います。自分の研究室を立ち上げるということで、自分の提唱した「筋骨格ヒューマノイド」の研究だけでなく、色々な新しい研究の種を撒いてゆければと思ってやってきました。農学部の先生と連携したユニークな研究等も実施することができ、色々と撒いた種が芽を出しつつあるように感じています。しっかり育てて、それぞれ大きな樹に育て、いつか実がなる日が来るように頑張ってゆきます。
![]()